Why P-band has been selected as information carrier for the ESA Biomass Mission? Before this question is answered, we will take a closer look at radar frequency bands.
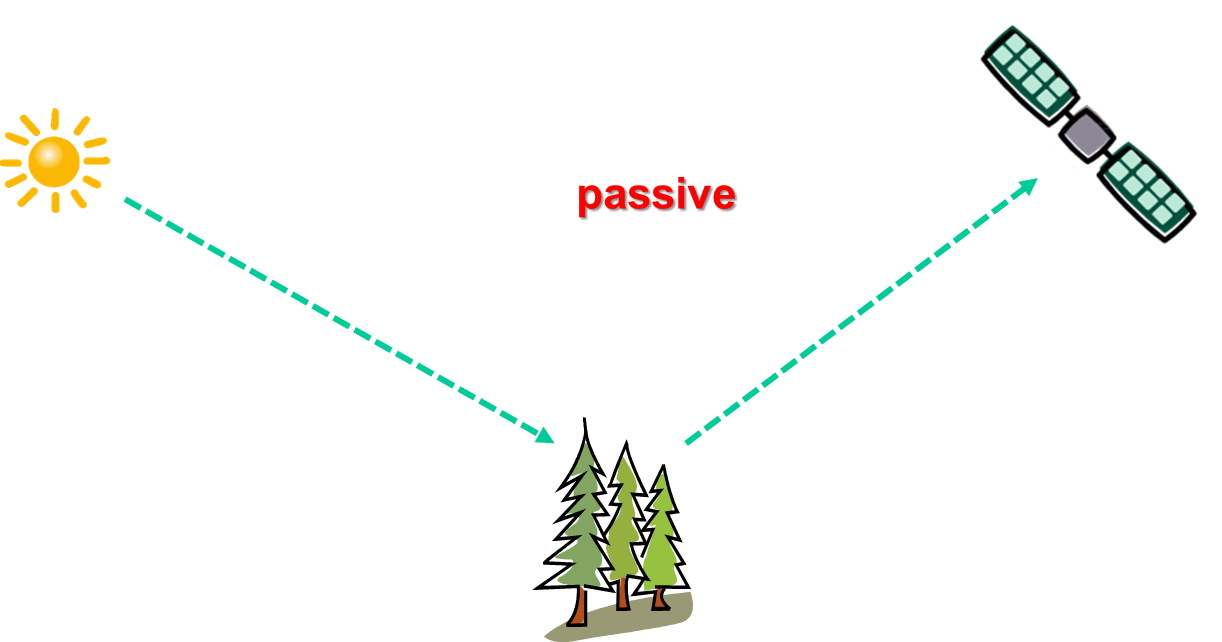
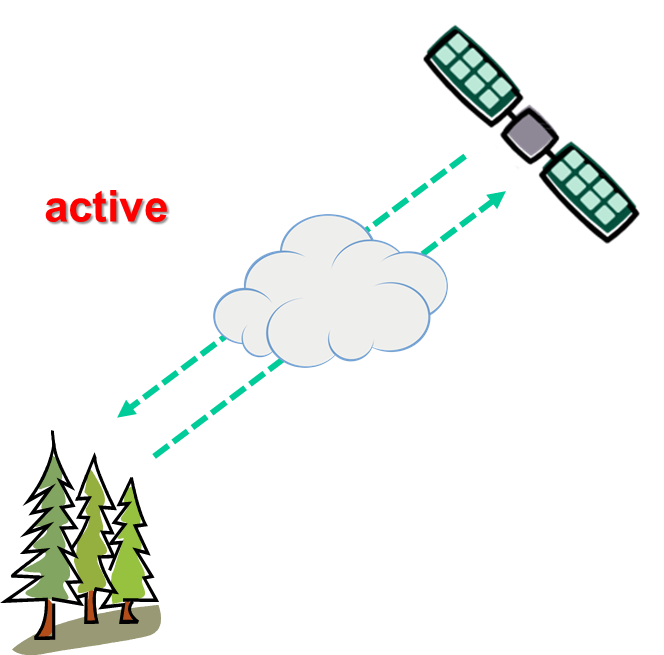
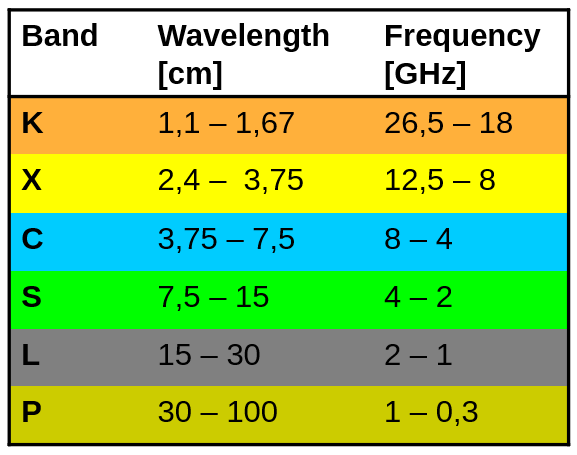
They are small sections of the electromagnetic spectrum, which integrates electromagnetic radiation at all wavelengths or frequencies. Active remote sensing techniques, like the P-band SAR Biomass Mission, are using the microwave region of the electromagnetic spectrum. This covers a wide range of wavelengths λ or frequencies f ranging from wavelengths of 1 mm (300 GHz) to 1 m (0.3 GHz).
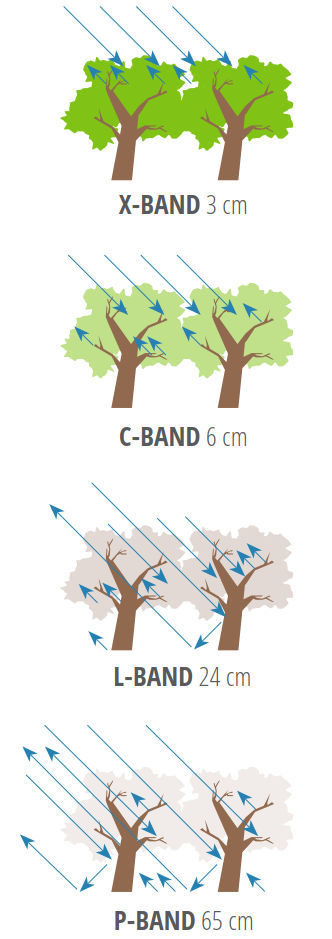
The microwave range is divided into a number of so-called radar bands, designated with a capital Latin letter.